Rocrail Neuigkeiten 2011
![]()
CAN-GC7 Modellzeit-Uhr |

- Datum: 08.12.2011
- Revision: 214
- Seite: CAN-GC7 (engl.)
Modellzeit-Uhr für den CANBUS.
Drehscheiben-Aktionen |

- Datum: 06.12.2011
- Revision: 3102
Aktionen zur Drehscheibe hinzugefügt, um Sounds etc. abspielen zu können.
Ausblenden von Teilfenstern in Rocview |

- Datum: 04.12.2011
- Revision: 3098
- Seite: Anzeige-Menü
Einige zusätzliche Unterstützungen für mehrere Instanzen von Rocview.
Touren |


- Datum: 18.11.2011
- Revision: 3051
- Seite: Touren
Wenn ein Fahrplan nicht lang genug ist, versuch's 'mal mit 'ner Tour.
Lok-Anzeige-Filter |
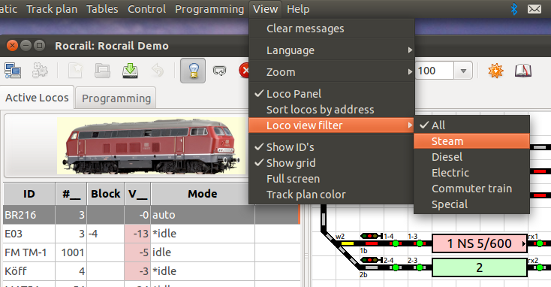
- Datum: 04.11.2011
- Revision: 2996
- Seite: zugkategorien
Für die Glücklichen mit hunderten von Zügen … 
CAN-GC3 |

- Datum: 22.10.2011
- Revision: 180
- Seite: CAN-GC3
Die CANBUS-DCC Zentrale wird in Kürze verfügbar sein. Alle Tests während der letzten Wochen verliefen positiv.
Die CAN-GC3 komplettiert die CANBUS-Lösung. Man braucht nicht mehr in schlecht funktionierende kommerzielle Hardware zu investieren; die Zeit ist gekommen, um in CAN-Geschwindigkeit zu arbeiten.
Professionell gefertigte Platinen sind beauftragt.
CAN-GC1/2 Firmware |

- Datum: 25.09.2011
- Revision: 172
Die Firmware für CAN-GC1 und CAN-GC2 wurde genehmigt und intensiv auf maximalen CAN-Durchsatz getestet.
Professionell gefertigte Platinen sind verfügbar
CAN-GC2-Einstellung |

- Datum: 03.09.2011
- Revision: 2880
- Seite: CANBUS FLiM
Die Firmware für CAN-GC2 ist einschließlich eines zugehörigen Einstelldialogs fertiggestellt.
andRoc Lok-Liste |

- Datum: 21.08.2011
- Revision: 310
- Seite: andRoc Fahrregler
Eine Lok-Liste mit Bildern zur Auswahl wurde im Fahrregler und Block-Dialog hinzugefügt.
Schiebebühnen-Unterstützung für andRoc |

- Datum: 19.08.2011
- Revision: 299
- Seite: Drehscheibe / Schiebebühne
Unterstützung von Schiebebühnen zum Drehscheiben-Objekt in andRoc hinzugefügt.
Schiebebühnen-Unterstützung |

- Datum: 11.08.2011
- Revision: 2817
- Seite: Schiebebühnen-Einstellung
Unterstützung von Schiebebühnen zum Drehscheiben-Objekt hinzugefügt.
NMRA ID: 70 |
- Datum: 31-07-2011
- Revision: -
- Seite: -
Stolz gebe ich bekannt, dass Rocrail jetzt offiziell eine eigene Hersteller-Kennung erhalten hat NMRA: 70.
Hauptsächlich wird sie für die von Peter Giling entwickelte CANBUS-Hardware verwendet. CANBUS-GCA
Unterstützung Draai15 |

- Datum: 26-07-2011
- Revision: 2775
- Seite: d15
Unterstützung der 'Draai15' (K.Moerman) Drehscheiben-Steuerung hinzugefügt.
Die Tests sind noch nicht vollständig abgeschlossen, aber die experimentelle Verwendung ist möglich.
CANBUS getestet |

- Datum: 24.07.2011
- Revision: 2761
- Seite: CANBUS
Seit heute wird CANCMD, die CANBUS-Zentrale-Station, unterstützt und so ist das Fahren von Loks Realität.
Die erforderliche Funktionalität ist getestet, um eine Anlage im Automatik-Betrieb mit Rocrail und CANBUS zu betreiben.
CANBUS-FLiM-Node Konfiguration |

- Datum: 14.07.2011
- Revision: 2725+
- Seite: CANBUS Node Setup (engl.)
Es wurde ein FLiM-Node-Einstell-Dialog als generelle Lösung für die Konfiguration von CANBUS-Nodes hinzugefügt.
Schreibzugriff durch Code |

- Datum: 28.06.2011
- Revision: 2694
Der neue optionale "Control-Code" kann zur Handhabung von Schreibrechten verwendet werden.
CANBUS-Einstellung |
- Datum: 21.06.2011
- Revision: 2661
- Seite: CANBUS
Der Einstell-Dialog für CANBUS wurde hinzugefügt. Aber… CANBUS-Unterstützung ist weiterhin in Arbeit! ;)
CANBUS |
- Datum: 11.06.2011
- Revision: -
- Seite: CANBUS
Die Unterstützung für das CANBUS-System wurde begonnen. Rocrail ist jetzt offizielles Mitglied in der MERG, um Test-Hardware erhalten zu können.
andRoc Weiches Zoomen |

- Datum: 06.06.2011
- Revision: 276+
- Seite: andRoc, Dirks Blog
- Android version: 1.5+
Weiches Zoomen implementiert. Das Lupen-Werkzeug bleibt sichtbar, um schneller zur gewünschten Größe zoomen zu können.
andRoc Modul-Ansicht |
- Datum: 04.06.2011
- Revision: 274+
- Seite: andRoc, Dirks Blog
- Android version: 1.5+
Viele Fehler der Plan-Ebenen- und Modul-Ansicht beseitigt. Auch für einige Fehler beim Zoomen und der Regler-Geschwindigkeit.
andRoc 1.4.266+ Option Kleiner Regler |

- Datum: 03.06.2011
- Revision: 266+
- Seite: andRoc, Dirks Blog
- Android version: 1.5+
Die Option "Kleiner Regler" (small throttle) wurde hinzugefügt, die standardmäßig aktiviert ist und es ermöglicht, den gesamten Bildschirm zu nutzen.
andRoc 1.4.262+: Funktions-Text |

- Datum: 02.06.2011
- Revision: 262+
- Seite: andRoc, Dirks Blog
- Android version: 1.5+
In der Regler-Ansicht werden die Funktions-Texte angezeigt.
andRoc Not-Halt und extra Spass |
- Datum: 01.06.2011
- Revision: 258+
- Seite: andRoc, Dirks Blog
- Android-Version: 1.5+
In der Regler-Ansicht wurde eine Nothalt-Option durch langes Drücken von "FG" hinzugefügt.
Es gibt jetzt auch eine 5. Funktionsgruppe. F29 und F30 sind deaktiviert.
andRoc 1.4.254+: Zoom zoom zoom |

- Datum: 30.05.2011
- Revision: 254+
- Seite: andRoc, Dirks Blog
- Android-Version: 1.5+
Gleisplan-Zoom wurde hinzugefügt, um dicke Finger und große Gleispläne zu unterstützen. 
andRoc 1.4.250+: Breitbild |

- Datum: 28.05.2011
- Revision: 250+
- Seite: andRoc, Dirks Blog
- Android-Version: 1.5+
andRoc wurde für die Unterstützung großer Displays angepasst. Das Aussehen differiert zu vorigen Versionen:
- Startansicht ist jetzt der Gleisplan anstelle des Lok-Reglers
- Alle anderen Ansichten, einschließlich des Lok-Reglers, werden im Dialog-Stil angezeigt
Rocrail-Client-Service-Port 8051 |

- Datum: 24.05.2011
- Revision: 2618
- Seite: IANA (engl.)
Stolz gebe ich den offiziellen Rocrail-Client-Service-Port 8051 bekannt. Von jetzt an ist das die standarmäßige Voreinstellung, wenn kein anderer Port in rocrail.ini und rocview.ini spezifiziert wurde.
20110524.075858.755 r9999I main OClntCon 0558 ClientConnection started on port 8051.

andRoc Signale |

- Datum: 21.05.2011
- Revision: 234, 235
- Seite: andRoc
Zweibegriffiges Hauptsignal, Vorsignal und Rangiersignal wurden andRoc hinzugefügt.
andRoc Text-Objekt |

- Datum: 20.05.2011
- Revision: 231
- Seite: andRoc
Zur Anzeige von Text wurde andRoc um ein Text-Objekt erweitert.
RocNet-Einstell-Dialog |

- Datum: 20.05.2011
- Revision: 2614
- Seite: RocNet (engl.)
Für die Konfiguration der RocNet-Verbindung wurde ein Einstell-Dialog hinzugefügt.
Signal-Befehlszeit |

- Datum: 18.05.2011
- Revision: 2612
- Seite: Signal-Befehlszeit
Optionale Wartezeit in ms zwischen Befehlen als Ausweg für einige Zentralen und Dekoder, die nicht in der Lage sind, zwei oder mehr Befehle innerhalb sehr kurzer Zeitabschnitte zu verarbeiten.
Drehscheiben-Symbolgröße |

- Datum: 16.05.2011
- Revision: 2611
- Seite: Drehscheibe: Position
Das Drehscheiben-Symbol kann auf 2 bis 5 Raster im Durchmesser eingestellt werden. Das Bild zeigt die Drehscheibe auf einem Mobil-Client in der Größe 2.
XpressNet V2 |

- Datum: 16.05.2011
- Revision: 2609
- Seite: XpressNet
Unterstützung für ältere Lenz-Zentralen mit Firmware-Version 2.x ergänzt.
Benutzer-Scripte |
- Datum: 15.05.2011
- Revision: -
- Seite: Scripting (engl.)
Das einzig Neue am Scripting ist die Tatsache, dass es nun dokumentiert ist; Rocrail-Scripting ist seit den frühen Anfängen des Projekts verfügbar.
Start-Fahrplan |

- Datum: 14.05.2011
- Revision: 2606
- Seite: Lokomotiven: Details
Diese optionale Kennung ist für Züge gedacht, die immer mit dem selben Fahrplen fahren und erspart die Einstellung von Hand.
Fahrstrassen-Synchronisation |

- Datum: 13.05.2011
- Revision: 2603
- Seite: Automatik
Sorgt dafür, dass gleichzeitig immer nur eine Fahrstrasse eingestellt wird, um den Leistungsbedarf zu reduzieren und Weichendekoder mit vielen Ausgängen nicht zu überlasten.
SRCP-Client-Unterstützung |

- Datum: 11.05.2011
- Revision: 2595
- Seite: SRCP-Service
Fehlerbeseitigung und Verbesserungen durch Lothar. Eine Vorführung erfolgt beim Stammtisch am 14.05.2011 in Speyer.
Drehscheibensteuerung MGV145 |

- Datum: 09.05.2011
- Revision: 2592
- Seite: Drehscheibe: Multiport, MGV145
Die neue MGV145 Schrittmotorsteuerung hat 6 Bits für die Auswahl der Gleisnummer. Das neu hinzugekommene Bit ist optional um Kompatibilität zu existierenden Steuerungen herzustellen.
Neue Firmware für MGV101 |

- Datum: 09.05.2011
- Revision: -
- Seite: MGV101
Dank des Einsatzes von Fred und seinem Sohn haben wir jetzt eine 100% funktionsfähige Firmware die auf UDP-Multicasting basiert. Peter und ich haben außerdem noch kräftig getestet und sind mit dem Ergebnis sehr zufrieden.
Weichensteuerung |

- Datum: 07.05.2011
- Revision: 2589
- Seite: Weichen-Steuerung
Die zuletzt verwendete IID und Modul-Nummer wird in der rocview.ini gespeichert, um in der augenblicklichen und kommenden Session verwendet zu werden, bis sie verändert wird.
Lokale IP für LNUDP |

- Datum: 04.05.2011, 06.05.2011
- Revision: 2586
- Seite: MGV101 Multicast
Diese Option war schon für ein paar Wochen implementiert, aber die Windows-Implementierung hat nicht funktioniert. Nach viel Ausprobieren habe ich heute im Internet einen Tipp gefunden, auf den ich nie gekommen wäre.
Anscheinend unterstützt die verknüpfte Windows Socket Library, wsock32.lib, diese Option nicht und muss mit der ws2_32.lib ersetzt werden… Jetzt geht's. Bitte melden, falls unerwünschte Nebeneffekte entdeckt werden sollten.
06-05-2011: Wurde getestet und für OK befunden. Danke an Fred.
Einrichtung des MGV136-Moduls |

- Datum: 03.05.2011
- Revision: 2585
Die zuletzt verwendete Setup IID wird in der rocview.ini gespeichert, um in der augenblicklichen und kommenden Session verwendet zu werden, bis sie verändert wird.
SRCP-Service |
- Datum: 02.05.2011
- Revision: 2582
- Seite: SRCP-Service
Neue Merkmale
- Lokomotiven mit Licht und einer beliebigen Anzahl von Funktionen zwischen 0 und 28 werden unterstützt
- Fehlerbehebung beim Session-Handling
- Unterstützung einiger Befehle (besonders Requests) durch Clients
- Unterstützung von pyControl-Clients (Teil von srcpd)
Einrichtung des MGV136-Moduls |
- Datum: 01.05.2011
- Revision: 2581
Die zuletzt verwendeten Servo-Setup-Adressen werden in der rocview.ini gespeichert, um in der augenblicklichen und kommenden Session verwendet zu werden, bis sie verändert werden.
Erweiterung des DB-Themas |

- Datum: 21.04.2011
- Revision: 2575, 2577
Das DB-Thema wurde mit einigen fehlenden Symbolen erweitert und erhielt eine Farb-Aktualisierung. Dank für die Arbeit an ChrisB.
Zusätzliche Funktionen im Fahrregler |

- Datum: 16.04.2011
- Revision: 2570
- Seite: Lok-Fahrregler
Der Fahrregler wird mit einer Schaltfläche für Funktionsgruppen "FG" erweitert, um zwischen den Funktionen F1-F12 und F13-F24 umschalten zu können.
Gleissymbole |

- Datum: 07.04.2011
- Revision: 2538
- Seite: Gleise
Benutzerdefinierte Gleissymbole anhand von SVG-Nummern. Die ersten allgemein verfügbaren Symbole sind einige Brücken-Symbole im Zubehör-Thema.
SNMP-Agent |

- Datum: 07.04.2011
- Revision: 2554
- Seite: SNMP-Service
Diese SNMP-Erweiterungen sind hilfreich, um in der Lage zu sein, Informationen über einen tagein, tagaus laufenden Rocrail-Server zu bekommen.
→ Springe zu den aktuellen Neuigkeiten
→ Springe zu den Neuigkeiten 2014
→ Springe zu den Neuigkeiten 2013
→ Springe zu den Neuigkeiten 2012